PROYECTO ROBOTICA INDUSTRIAL ABB
INTRODUCCION:
Proyecto basado en el montaje de baterías eléctricas de los coches y su posterior posicionamiento y soldado a la carrocería.
OBJETIVO DEL PROCESO:
El objetivo es el montaje de las baterías eléctricas de los coches y su posterior posicionamiento en el coche. En este proyecto se monta el complejo de las baterías, y después se posiciona en el coche y se suelda a la carrocería.
Una vez colocada la batería interna en la carcasa, esta se pegará mediante un robot que pega esta batería a la carcasa inferior. Después, pasará por una fase de montado de donde obtendremos directamente la batería con la carcasa exterior superior montada a la carcasa exterior inferior , es decir, la batería completa. Esta batería es transportada por el robot hasta ser posicionada en el coche. Después, un robot suelda la batería a la carrocería del coche.
ELEMENTOS UTILIZADOS:
4 robots ABB:
| -1 IRB1520ID_4_150__02 : Robot encargado de pegar la batería interior a la carcasa. Este robot tiene como tarea principal la soldadura. |


  |
-1 IRB6660_100_335__01 : Este robot es el encargado de transportar la batería completa hasta la posición en la carrocería del vehículo a donde va a ser soldada.


-Cinta transportadora para el robot 4:
RTT_Bobin_3_7 : será la cinta encargada de mover horizontalmente al robot 4.

- 4 – Cintas SC_BeltConveyor : encargadas de transportar los materiales (Batería interior, carcasa exterior inferior y batería al completo).

-1 Herramienta de soldadura -AW_Gun_PSF_25
Esta herramienta suelda la batería al completo a la carrocería del coche.

-1 Herramienta exclusiva para pegar las baterías a la carcasa externa inferior -Binzel_ID_22
Aunque esta herramienta sea para efectuar soldaduras, en este proyecto se le suprime el sistema de soldado y a la propia herramienta se le implementa un sistema de pegado industrial.

-2 Herramientas de tipo ventosas
Esta herramienta es la encargada de transportar la batería interior e introducirla en la carcasa exterior inferior para su posterior unión mediante pegamento industrial.

-4 IRC5 Compact - Encargados de controlar los robots.

SISTEMA DE SEGURIDAD
S7-1200 de seguridad: Utilizamos un S7-1200 que controla todas las entradas y
salidas utilizadas por diversos elementos de seguridad , con el fin de que ante
un fallo este detenga todo el proceso.

Vallas de seguridad: encargadas de que el operario no pueda acceder a la celda. La única vía de acceso a la celda es por la puerta y esta tambien tiene un sistema de seguridad.

Cierre de seguridad: En caso de que el operario entre en la celda mientras el proceso esta en funcionamiento, este provocara un aparada inmediata de todo el proceso.

Panel de control: El operario dispondrá de un panel de control para poder ver como esta todo el proceso y para poder controlar los robots.

Balizas: En la celda se encuentran diversas balizas de funcionamiento para indicarnos el estado del proceso. ( Balizas de emergencia, …).

FUNCIONAMIENTO DE LA CELDA ROBOTIZADA:
En primer lugar , La Cinta 1 y 2 alimentaran al proceso con los materiales necesarios. La cinta 1 proporcionara la batería ya fabricada y la cinta 2 proporcionará la carcasa externa inferior. Cuando estas dos lleguen a la posición necesaria, El robot 1 será el encargado de coger y depositar la batera en la carcasa. Después, el robot 2 se encargará de pegar la batería a la carcasa mediante pegamento industrial. En este proceso montamos la batería con la carcasa externa inferior, a la que mas adelante se le añadirá la carcasa externa superior para tener la batería montada al completo y lista para posicionarla en el coche.
En segundo lugar, el robot 3 es el encargado de coger la batería ya montada y posicionarla en el coche mediante una ventosa. Una vez posicionada , el robot 4 , que se desplaza horizontalmente gracias a una cina transportadora, comienza su tarea y suelda la batería completa a la carrocería.
PROGRAMACIÓN DE LA CELDA ROBOTIZADA:
-ROBOT 1:
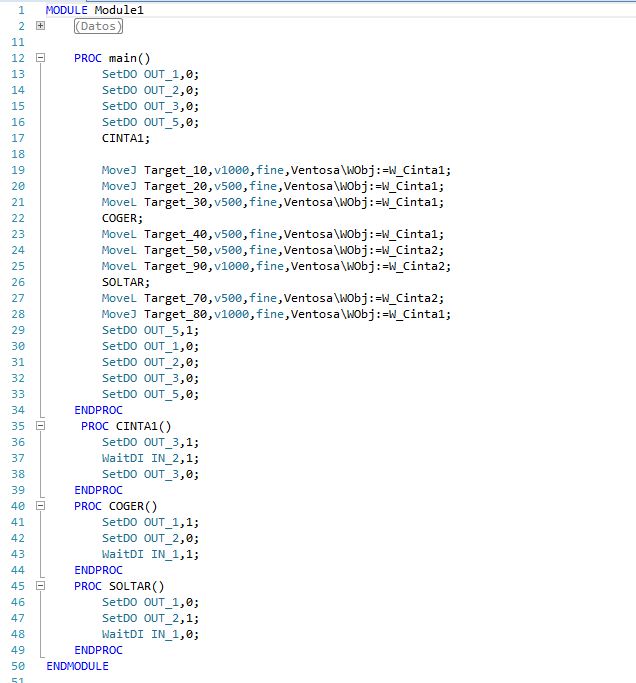
-ROBOT 2:

-ROBOT 3:


LOGICA DE ESTACIÓN:

SIMULACIÓN DE LA CELDA ROBOTIZADA:
- Enlace Proyecto ABB
No hay comentarios:
Publicar un comentario